input power wiring point: input power wiring point:
Single external power supply:AC 110V-220V or DC 150V~300V 3A.
Warning:The value of the power supply shouldn’t be over this range.
 For two-phase four-wire motor: For two-phase four-wire motor:
phase |
A+ |
A- |
B+ |
B- |
Wire |
Red |
Green |
Yellow |
Blue |
For four-phase six-wire motor:
phase |
A+ |
A- |
NC |
B+ |
B- |
Wire |
Red |
Green |
White
Black |
Yellow |
Blue |
For four-phase eight-wire motor, there are two modes
i.shunt-wound
Phase |
A+ |
A- |
B+ |
B- |
Wire |
Red(L)
Green(S) |
Green(L)
Red(S) |
Yellow(L)
Blue(S) |
Blue(L)
Yellow(S) |
ii.series-wound
Phase |
A+ |
A- |
Nc1 |
B+ |
B- |
Nc2 |
Wire |
Red
(L) |
Green
(L) |
Red(S)
Green(S) |
Yellow
(L) |
Blue
(L) |
Yellow(S)
Blue(S) |
Warning:Motor’s wires mustn’t be connected wrongly, Otherwise, the driver will be mangled.
Input signals
The inner interface circuit of the SH20611D are segregated by optically coupled isolators.
There are three connecting mode between the controller and the driver.
i. Differential
ii.Common-cathode
iii.Common-anode
Signal Amplitude |
R |
5V |
--- |
12V |
680Ω |
24V |
1.8KΩ |
DIR:Input port of the direction signal. High/low level
control the CW/CCW of motor. The changing
edge of the signal must be at least 2.5us later or
earlier than the falling edge of CP;
FREE: Free signal (active low). when this input end is
low level,there will be no holding torque of the
motor.
CP: Pulse signal input. active by the falling edge,the
highest response frequency can be 200kHz,low
level pulse width should be not less than 2.5us。
Warning:Input signal must have enough current, (Currently, TTL, COMS signal are not drive firsthand). Otherwise, System can not run normally.
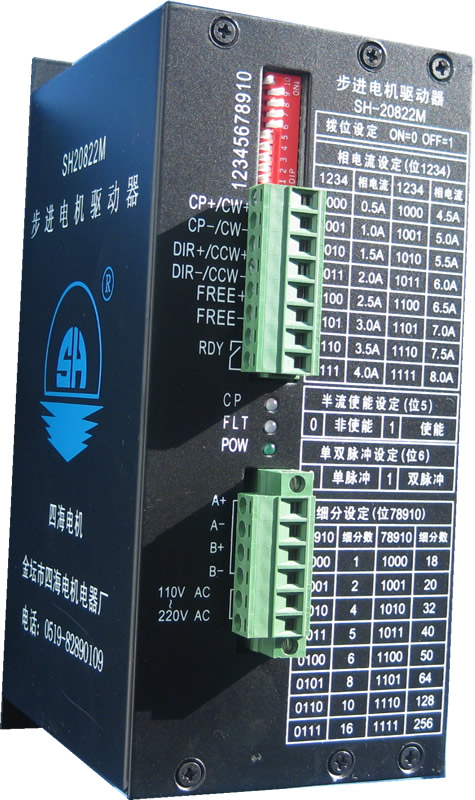
* phase current and subdivision number setting:
Shift switch is adopted to set phase current and subdivision number in SH20611D driver. There-into, Switch 5 is half phase-current (ON means full current , OFF means half), switch 6 is the setting of single or double pulse(ON show single pulse CP,DIR; OFF show double pulse CW,CCW). See Table2,Table3.After the subdivision of driver is set, the step angle in motor is equal to whole step angle divided by subdivision number. For example:if subdivision number is set to 18 and the motor is 2-phase,its subdivision step angle is 1.8°/18=0.1°。
Warning:shift switch ON=0,OFF=1.
Phase current(bit 1 2 3 4) |
1 2 3 4 |
Value |
1 2 3 4 |
Value |
0 0 0 0 |
0.50A |
1 0 0 0 |
4.50A |
0 0 0 1 |
1.00A |
1 0 0 1 |
5.00A |
0 0 1 0 |
1.50A |
1 0 1 0 |
5.50A |
0 0 1 1 |
2.00A |
1 0 1 1 |
6.00A |
0 1 0 0 |
2.50A |
1 1 0 0 |
6.50A |
0 1 0 1 |
3.00A |
1 1 0 1 |
7.00A |
0 1 1 0 |
3.50A |
1 1 1 0 |
7.50A |
0 1 1 1 |
4.00A |
1 1 1 1 |
8.00A |
Table 2
subdivision(bit 7 8 9 10) |
78910 |
Number |
78910 |
Number |
0 0 0 0 |
1 |
1 0 0 0 |
18 |
0 0 0 1 |
2 |
1 0 0 1 |
20 |
0 0 1 0 |
4 |
1 0 1 0 |
32 |
0 0 1 1 |
5 |
1 0 1 1 |
40 |
0 1 0 0 |
6 |
1 1 0 0 |
50 |
0 1 0 1 |
8 |
1 1 0 1 |
64 |
0 1 1 0 |
10 |
1 1 1 0 |
128 |
0 1 1 1 |
16 |
1 1 1 1 |
256 |
Table 3
III、Installation Dimension:
Disperse heat by compelling structure is adopted, so when installing, please keep enough space to elimination of heat when the driver installed (unit: mm)

|