MC64微电脑多段步进电机控制器(MM2多段型)使用说明
MM2型多段控制器采用程序固定、数值修改的方法进行编程。其编程、操作均非常简单,能接收和控制外部信号或动作。可与步进电机驱动器、步进电机组成一个步进电机控制系统,能控制一台步进电机多段运行,可广泛应用于一维控制的各种自动化领域。
一、MM2系统特点
| 1、 |
可设定1-20段运行(不同的工作状态) |
| 2、 |
具有正反手动调节功能 |
| 3、 |
初始速度设定,每段运行速度、长度、方向等可调 |
| 4、 |
5条升降速曲线选择 |
| 5、 |
个性化设定(即隐藏设定) |
| 6、 |
双排数码显示,可显示当前的运行状态 |
| 7、 |
可接受外接信号控制并控制外部动作 |
| 8、 |
用电子齿轮进行参数换算,显示值即为实际值 |
| 9、 |
输入信号极性及反应速度均可调 |
| 10、 |
超高速单片机控制,可直接驱动我厂生产的SH系列步进电机驱动器 |
二、控制面板

三、显示及功能键说明
| 1、显示: |
|
| (1)、上排6位数码: |
在功能设定时显示功能名称 |
| |
在运行时显示循环计数。 |
| (2)、下排4位数码: |
在功能设定时显示设定值。 |
| |
在运行时显示工作段号。 |
| (3)、红色发光管(STOP): |
在运行、停止状态时为停止状态指示灯。 |
| |
处于设定状态时不闪烁为确认,闪烁表示数值可修改。 |
| (4)、 绿色发光管(RUN): |
在运行、停止状态时为自动运行状态指示灯。 |
| |
当红绿发光管轮流频闪时,系统循环设定有误,此时可重新进行参数设定, |
| |
直至错误消除。 |
2、按键说明:
所有的功能键均为复合键,在不同的工作状态时显示不同的功能。
(1)、 为设定键和确认键: 为设定键和确认键: |
在停止状态下,按可进入设定状态。 |
| |
在功能设定状态按 表示数据已确认并进入下一功能设定。 |
| |
|
(2)、 为清除键:
为清除键: |
在非设定状态下按可清除循环计数值。 |
| |
处于设定状态时按可退出设定状态。 |
| |
连续按此键约3秒钟,累计数清零(循环次数为零时,上排六位数码显示累计数)。 |
| |
|
(3)、 为减少和停止、启动键:
为减少和停止、启动键: |
在设定状态时减少设定值,在非设定状态时可将连续运行、停止状态进行切换。当处于停止状态时,按此键则进入连续运行(RUN绿灯亮),再按此键则退出连续运行状态(STOP红灯亮),完成当前段运行后停止。 |
| |
|
(4)、 为增加和手动一次给定键: 为增加和手动一次给定键: |
在手动状态时,按
电机正转。在设定状态时按 可增加设定值。在手动状态时按 电机可反转。在停止状态时按 完成当前段一次运行。(假定运行段设定为5,第一次按下此键则运行第一段,再次按下此键则运行第二段,依次类推,当完成第五段运行后再按此键则运行第一段,依次循环)。 |
| |
|
四、功能设定
上电后电机自动运行第0段,然后处于停止状态,上排数码显示循环计数值(上电自动复零),下排数码显示当前运行段号。按设定键
,进入功能设定。
每按一次设定键,依次循环出现如下图所示功能:
XX的初始值为00
具体功能如下:
等待时间设定值 |
电机方向设定值 |
电机运行方向 |
相应情况说明 |
| 0.98 |
|
|
步进电机按设定方向运行当前段停止后,受外部起动信号INA端控制,由高电平进入低电平触发进入下一运行段。 |
| 0.99 |
|
|
步进电机按设定方向一直运行于当前段,受外部限位信号INS端低电平触发停止当前段运行,进入下一运行段。 |
| 1.98 |
|
|
步进电机按设定方向运行当前段停止后,受外部起动信号INA端控制,由低电平进入高电平触发进入下一运行段。 |
| 任意值
|
0 |
正 转 |
步进电机按设定方向运行当前段停止后,受外部起动信号INS端控制,低电平触发立即结束本段运行。 |
| 1 |
反转 |
|
除0.99 |
2 |
正 转 |
步进电机运行不受外部信号INS控制。 |
| 3 |
反转 |
| 等待时间设定: |
上排数码显示“S-t XX”,下排显示设定值“XX.XX”(s),从0.00秒至99.99秒。当设定值为0.98秒时,当前段运行停止后由外部起动信号端INA控制,由高电平到电平触发而进入下一个运行段。当设定的等待时间为0.99秒时,当前段一直运行至限位信号端INS低电平触发进入下一段或按结束当前段运行。当设定值为1.98秒时,当前运行停止后由外部起动信号端INA控制,由低电平到高电平触发而进入下一个运行阶段
.当设定值大于0.00秒时,则当前段运行停止后等待所设定的时间进入下一个运行段。当设定值大于0.00秒时,则当前段运行停止后等待所设定的时间进入下一个运行段。 |
| |
|
| |
在设定时,每按一次或键,所设定的数值便保存下来,即使掉电也不丢失。处于设定状态时,若较长时间(10秒)不按任何键,则自动退出设定状态,当前设定值无效。
按
键,进入自动运行状态,电机按第一段设定开始运行,直至循环结束恢复为停止状态。若在电机运行过程中再次按下 键,则当前段运行完成后停止。
|
五、典型的工作方式图
1、 工作方式A
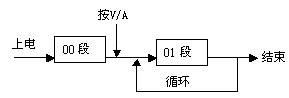
注:设定”SEG”=1, “cyc 1”=01,cyc 2=01,”cyc n”=A,即完成01段A次循环。
2、 工作方式B
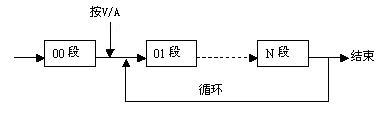
注:设定SEG=N,cyc 1=01 ,cyc 2=N, cyc n=A,即完成01段至N段A次循环。
3、 工作方式C

注:设定“SEG=N+1“,cyc 1=01,cyc 2=N,cyc n=A,即完成从01段到N段A次循环,再运行N+1段。
4、 工作方式D

注:设定“SEG=N+1“,cyc=M,cyc 2=N,cyc n=A,即完成从M段到N段A次循环,再运行N+1段
六、MM2与我厂SH系列驱动器及步进电机连接示意图(以2024B为例)
*MM2与共阴极的其他厂家驱动器不能相接!
七、个性化设定(隐藏设定):
| 上电前按住清除键 进入隐藏设定。 |
| 上排显示: |
PASS。 下排设定到123后按 即可进入。 |
| 上排显示: |
ina-dt,即ina(输入端)输入延时。下排显示延时数值,0无延时,数值越大,延时越长。 |
| 上排显示: |
ina-ON,即ina(输入端)输入极性,为1不变,为0反相。 |
| 上排显示: |
ins-dt,即ins(输入端)输入延时。下排显示延时数值,0无延时,数值越大,延时越长。 |
| 上排显示: |
ins-ON,即ins(输入端)输入极性,为1不变,为0反相。 |
| 上排显示: |
HIdE --. |
下排显示:on或oFF。通过 来选择On表示上电后自动运行,oFF表示上电后不自动运行。 |
| 上排显示: |
HidE A |
下排显示:XXXX下排显示从左向右数第一位表示SP0,第二位表示Acc,第三位表示SEG。第四位表示为d10000。按 进入下排每一位设定按 则进入每一位的增减设定。每位设定为1时显示,为0时隐藏。 |
| 上排显示: |
HidE b |
下排显示:XXXX下排显示从左向右数第一位表示cyc 1,第二位表示cyc 2,第三位表示cyc n。第四位表示为空。按 进入下排每一位设定按 则进入每一位的增减设定。每位设定为1时显示,为0时隐藏。 |
| 上排显示: |
HidE XX |
(其中XX表示线位) 下排显示:XXXX下排显示从左向右数第一位表示DIR XX,第二位表示SPD XX,第三位表示Lon
XX。第四位表示 S-t XX。(其中1为显示,0为隐藏),按 进入下排每一位设定
按∧/H 则进入每一位的增减设定。 |
| |
|
|
八、设定举例:
例一:
设一压轮直径为31.83mm,周长则为100mm,若采用5细分驱动器直联。此时每10000个脉冲转10,共1000mm,则电子齿轮(D10000)为1000(每步为0.1当量)。
初始速度(SPO)为400HZ(40.0mm/s),加速度(ACC)为2。
若起动时需(第0段)第二个电机正向复位(运行至零点,INS端由高电平变成低电平)此时速度为200HZ(20.0mm/s),按自动运行键后(循环开始)(第1段)正向走100步(10.0)300HZ(30.0mm/s),(不考虑零点),停0.4秒;(第2段)电机反向200(20.0mm)步500HZ(50.0mm/s),(不考虑零点),停0.5秒;(循环结束,20次循环),(第3段)电机正向复位(运行至零点)。
编程:SPO=40.0。
ACC=2。
D10000=1000(相当于每步0.1).
SEG=3(共需设定4段,包括0段)
CYC 1=1 (循环开始段)。
CYC 2=2 (循环结束段)。
CYC N=20 (循环次数)。
第0段(此段上电自动运行);
DIR 00=0(电机正向,遇零点会停)。
SPD 00=20.0(此时速度为200HZ)。
LON 00=10.0(此时100步)。
第1段:
DIR 01=2(电机正向)
SPD 01=30.0(300HZ)
LON 01=10.0(100步)
S-T 01=0.40(停0.40秒)
第2段:
DIR 02=3(电机反向)
SPD 02=50.0(500HZ)
LON 02=20.0(200步)
S-T 02=0.50(停0.50秒)
第3段:
DIR 03=0(正向,遇零点会停)
SPD 03=20.0(此时速度为200HZ)
LON 03=10.0(运行100步)
S-T 03=0.99(一直运行,遇零点停)
例二:系统电子齿轮为785,初速度为1,加速曲线为2(不受外部信号控制)作3段式100次循环运行,具体要示如下:
第一段:正转(2)、速度为V1、运行长度为L1、停顿时间为T1;
第二段:反转(3)、速度为V2、运行长度为L2、停顿时间为T2;
第三段;正转(2)、速度为V3、运行长度为L3、停顿时间为T3;
操作步骤如下:
| |
按
 SPO SPO  按 或下排显示至1; 按 或下排显示至1; |
| |
按 Acc 按 或下排显示至2; |
| |
按 SEG 按 或下排显示至3; |
| |
按 d 10000 按 或下排显示至785; |
| |
按 cyc1 按 或下排显示至1; |
| |
按 cyc2 按
或下排显示至3; |
| |
按 cyc n 按 或下排显示至100; |
| |
按 dIR 00 可不设置; |
| |
按 SPd 00 可不设置; |
| |
按 Lon 00 可不设置; |
| |
按 S-t 00 可不设置; |
| |
按 dIR 01 按 或下排显示至2; |
| |
按 SPd 01 按 或下排显示至V1; |
| |
按 Lon 01 按 或下排显示至L1; |
| |
按 S-t 01 按 或下排显示至T1; |
| |
按 dIR 02 按 或下排显示至3; |
| |
按 SPd 02 按 或下排显示至V2; |
| |
按 Lon 02 按 或下排显示至L2; |
| |
按 S-t 02 按 或下排显示至T2; |
| |
按 dIR 03 按 或下排显示至2; |
| |
按 SPd 03 按 或下排显示至V3; |
| |
按 Lon 03 按 或下排显示至L3; |
| |
按 S-t 03 按 或下排显示至T3; |
| |
按 上排显示为0,下排显示为0,程序设定结束; |
| |
按 退出程序设置(在任意设定状态按此键均可退出程序设定); |
| |
按 程序开始运行; |
九、后排接线说明;
| OPTO: |
输出信号公共阳端,本控制器自带电源,可直接与驱动器的OPTO端相连。 |
| CP: |
电机脉冲输出端 |
| DIR: |
电机方向输出端 |
| OUT: |
集电极输出(当DIR XX=X1 X运行时,集电极下拉。 |
| |
|
当DIR XX=X0 X运行时,集电极开路。) |
| VCC、GND: |
直流电源DC 12V,供外接传感器使用,输出能力仅50mA。 |
| INA: |
起动(触发)信号输入端 |
| INS: |
限位信号输入端 |
| J1,J2: |
继电器常开输出,当DIR XX=1X X运行时,继电器吸合。 |
| L、N: |
交流电源输入,连接220V交流电,当DIR XX=0X X运行时,继电器释放。
|
| |
|
|
十、安装
外形尺寸:72(mm)*72(mm)*135(mm),开孔尺寸:67(mm)*67(mm).
注意:
在布线安装时,应尽量远离动力电源线、交流接触器等干扰源!避免影响、干扰控制器的正常工作。当信号线较长,且有干扰时,请使用屏蔽线。
|