上图为面框示意图,上电后为初始状态:显示了一幅图,可以F1或F2切换不同的图案,共9幅。
此状态下,按F3手动键 ------- 进入手动状态
按F4参数键 ------- 进入系统参数设置状态
按F5编辑键 ------- 进入文件编辑管理状态
按F6自动键 ------- 进入程序运行状态
各状态之间的切换必须用退出键退回原始状态再进入方可。
( 一 )手动状态
手动状态提供手动方式来调试系统,其界面如下:
组号为F0键,清零为F2键,方式为F4键,检测为F6键。
组号(F0):是指手动运行时4只电机分成2组,一组是X1,Y1电机:X1为0号电机,Y1为1号电机。另一组是X2,Y2电机:X2为2号电机,Y2为3号电机。二组之间只能运行一组,运行X组按 、 、 键,运行Y组按 键,运行Y组按 、 、 键。用组号键在二组之间进行切换。 键。用组号键在二组之间进行切换。
注:0号、1号、2号、3号电机对应的程序编号分别为D0、D1、D2、D3。
清零(F2),是清除当前组的位移值,按后系统会显示“确实要清零位移”,同时反白显示当前位移组号,按确认键确认,其他键不确认。
位移 X1 □□□□. □ 位移 X2 □□□□. □
位移 Y1 □□□□. □ 位移 Y2 □□□□. □
显示当前的电机走过的位移量,其值为脉冲值乘以电子齿轮,有正负之分。如果显示正,正向运行时显示会继续增加,一旦超过9999.9会回归成0,反之相减。
方式(F4),用于手动时选择增量和点动二种运行方式,屏的上方一行有提示。增量方式是指按一下就运行所设定的脉冲数。点动方式是指手按下一直运行,松开就停止运行。脉冲增量可以修改。
用、控制X电机正反转,、控制Y电机正反转。
手动速度 X 6000
手动速度 Y 4000
手动速度是指手动时电机的运行速度,其调整分X,Y两轴,X速度是调整电机0、2号,Y速度是电机1、3号。速度单位是每秒脉冲数.
调整数据首先是修改键或数字键后光标闪烁方可进行,而且不能在检测状态。用、、、键来选择相应的位,用确认键将改动确认,若不想改动可按退出键取消。修改状态上出现“设置”字样,速度最大可显示65535,但最大速度受限于最大的曲线顶端。
脉冲增量 X(Y) 5000
指方式选择增量时,每按一次、、、键电机一次走完的脉冲数。其数据修改同手动速度X(Y),最大值亦为65535,修改时,可用清除/回格将其清零,再输入数字。
检测(F6),按后显示输出口当前状况,H为高电平,L为低电平,可以用、键选择位,用0键来设置输出口为L,1键将输出口改为H。输出口为锁存口,若不改动的话则一直保持原状态,退出手动状态时也是这样。
输入A 0H 1H 2H 3H 4H 5H 6H 7H
输入B 0H 1H 2H 3H 4H 5H 6H 7H
输入C 0H 1H 2H 3H 4H 5H 6H 7H
输入A,输入B,输入C指外接端子上的输入信号。手动状态时,会实时反映其状态,H高电平,L低电平。若当前刚改变过,当前显示位反白。
输出A 0 1 2 3 4 5 6 7
输出B 0 1 2 3 4 5 6 7
输出的改变只有在检测状态下,即按检测键后,其屏显顶上中部出现检测字样,用1键表示高电平H,0键低电平L。
其它功能要退出检测状态才有效。
可以再按检测键或退出键,退出检测状态。
用退出键退出手动状态回原始画面。
( 二 )参数设置
系统在正式工作前必须进入系统参数设置状态设置相关参数,否则系统无法正常工作。其界面如下:
曲线选择:曲线是指电机采用的加速启动和减速停止的速度变化曲线。有M,N两组曲线,M曲线对应X组的电机,N曲线对应Y组的电机。可以分别有0-6共7条曲线。0为加减速最快,6为加减速最慢。
每阶次数是指曲线上的每个速度值改变所运行的次数,次数越多加减速越慢,每个电机可分别选择,惯量越大的负载采用的曲线越慢。此曲线选择不当,电机将无法启动和停止或影响速度。
电子齿轮指各电机的每个脉冲所走过的位移量。此值一旦设定有误,位移将同比例增加或减少。D0 1.0000表示为1个脉冲。
计数分频 C X 是指本系统的编码入口的脉冲数(输入A.7)的硬件计数器,当计数到了该数值的时候,系统会产生硬件中断。当该数值乘以计数中断的值与计数器相同时中断计数起作用。当该数值为0时,则关闭编码器计数中断,从而计数中断起不了作用。
本屏参数修改可直接按有效数字键或者修改键改变数值,此时光标会闪烁,再用确认键确认或退出键退回刚才页面。或用清除/回格键清零。
初始(F7)键按后屏上显示本系统默认参数曲线选择2,每阶次数1,电子齿轮1.0000,计数分频0。
其数据范围是 曲线选择 0~6
每阶次数 1~9
电子齿轮 0.0001~5.9999
计数分频 0~255
( 三 )编辑状态
编辑状态用于文件的管理和程序编辑。
如上图,屏上显示文件目录,光标停留在当前使用的文件上,例如W12。可用上下键来移动选择文件,也可用上下页键来翻屏选择文件。
选择当前文件后用确认键打开此文件。
当前屏有关按键如下:
新建F0 拷贝F2 删除F4 通信F6
其功能分别是:
新建 (F0):用于新建文件。新建文件名 Wxx ,首先建个文件名是符号W后面加两位数字。可以是00~99。用数字键录入,若给出的数字与原来的都不相同则认了这一文件名且可输入程序,否则要重输文件名或者直接按退出键回到上一目录文件目录上去。新建的文件排在文件目录的最后,且退出后也不认为是当前文件。本系统可支持40个文件,即序号由0~39,如已有40个文件要再建文件,要先删除一些再建新文件。
拷贝 (F2):用于把当前文件拷贝到一个新文件。同样拷贝的文件要先指定一个新文件名。按拷贝键后屏下方出现拷贝文件 W xx 到 W x。此时输入新文件名,若文件与原来文件同名会有提示“文件 W xx 已存在,是否覆盖”按确认键确认,退出键回到前面重新更名新文件。不输入文件名,可用退出键回到文件目录状态。
删除键 (F4):用于文件的删除。按后出现“确实要删除文件W xx?”按确认键确认,其余键除退出键外退回文件目录状态。
通信键 (F6):用于二只相同的控制器之间的文件拷贝。按此键后屏幕下方出现

此时用左右键来选择发送或者接受文件,用确认键确认。
选择发送文件
提示为“选择发送文件 W 21 ”此时可用向上、向下或者上页、下页键来选择当前文件来发送。
注:发送时要求与另一只同类型的控制器串行通讯口(J9)用电缆相连且另一台控制器处于接收状态。
发送成功显示 “文件 xx 发送完毕”。
发送时,可以用退出键退出发送状态。 再按退出键,退到通信状态。
选择接收文件
接收文件时,显示开始接收文件,请等待!
若此时另一台控制器正处于发送文件状态,则可以接收文件。现在可以退出键回到通信状态。
文件传送成功显示 “接收完毕,请输入文件名 W xx”,用数字键录入1或2位文件名。
此时文件名要与机内已存文件名都不同,否则重输。
若文件数超过40,则会提示文件数溢出,要先删除一些。
文件名确认后显示 :

用、键选择其一,再用确认件确定,保存新文件,保存最后序号加1,放弃则退回通信界面。
打开直接把传过来的新文件打开。
新文件打开后,在退出时,若选了不保存退出,则新文件视同放弃。
文件的传送时,先选择接收后再打开发送,否则,需要在一个短时间(10秒)进行操作。
文件的编辑
新的文件在建立了文件名后,或者原来文件选定后用确认键确认,再就是发送过来的文件打开后,也可以直接输入文件名。输入第一个数字会在左上角出现Wx,再按确认键便可打开文件进入文件的编辑,包括插入,删除,更改等等内容。
程序指令格式:
行数 标号 指令名称 格式和参数
如:
N0004 L01 延时 2.00
N0005 电机及方向 0100-1X11
解释:
N0004 为当前前指令的行数第04行
L01 为这条延时指令的标识符号
延时 指令为延时
2.00 为延时的数值为2秒
上图,其屏右上角的数字为当前指令的总行数,左边的N000~Nxxx为行号,每一条指令占据一行,一屏有效行最多14行,一个文件最大255行,即从N000~N254。
行查找用向上向下键进行行-行之间的切换,由当前光标决定当前行(光标在查找时定位在指令上)。
用上下页键进行一屏之间的切换,此时光标落在上下顶行端。
用左右移动键进行一行指令与参数,标号之间的切换,由光标定位在选定后欲改动的数据,如标号指令或参数可用修改键进行修改,此时光标闪烁。
1.指令行插入
在非修改时(光标不闪),按确认键即可插入一行新的指令行,这时出现新的行号及结束指令,光标闪烁。用上下键找到需要的指令,按确认键进行确认,随即显示出相关的指令参数。等参数确认后光标不闪再按确认键,光标跳至下一行完成指令插入。
2.指令行删除
在光标不闪时,用删除键可以删去一行内容,出现行号加空光标闪烁,此时可以再按删除键或确认键确定删去这一行,也可用退出键取消删除操作回原来。
3.指令修改
指令修改只能在一行中进行。首先将光标选定欲修改的行,再用左右键选择要改的内容分为标号、指令、指令参数,然后再按修改键,光标将闪烁。标号、指令参数用数字键输入,指令的修改时用上下键来翻指令表,选好后用确认键确定。不想确定可以用退出键回到原来。
在改变指令内容时,其参数要确认后才会自行给出,且一条指令参数没有给全是不能用退出键退回的。
指令参数的输入或改动有以下几种:
a.移位加数字 如电机及方向的参数 0111_1XXX,其数字只能是0与1,而且为改0了以后不能再改写0,改1后不能再改写1(有效数字时会讯响一下)。
b.插入方式 数字从右端进入,原来数据左移一位,此时屏上右方出现插入字样,如延时的整数部分输入,插入的数字是光标的左位,如123X,X为光标位置,按4后1234X。一般可将数字用清除/回格清零后用此法输入数字。输入数字有效会讯响一下。
c.改写方式 一般的数字输入方法即用移位光标到对应位上后改数字,改写状态时屏上右方有改写字样,数据改动光标闪烁时,可用退出键退回原态,或者确认键确认之后光标不再闪烁,即不在修改状态。一旦进入修改状态,若数据可修改的总是先是插入方式,进入改写方式要按 改写/插入键,在改写方式时再按一下该键又会回到插入方式。
4.标号的增加
把光标定到要加标号的指令上,按一次修改键则光标闪烁(即指令条闪烁),然后再按一次修改键会出现 Lx。现在可用数字加上标号内容,再用确认键确认。而后,光标会移到指令上,要确定标号有效还要再确认一下,直至光标移到指令条的参数上,现在增加的标号就有效了,否则用退出键则会取消刚加的标号。
5.标号的修改
首先将光标定位在L标号的数字上,然后用数字键改数字,可用清除/回格键回退当前位,回退到数字结束则会退出标号。高位数回格时是将低位消去,低位时回格是消去高位数字,也可用删除键将当前数字删去。如果把光标移到L上,用删除键将标号删去,注意这样的话标号会直接删去了不可再恢复,而其他的改动后,可用退出键回到初态。修改了后,可用确认键确认或用退出键复原,光标停止闪烁。
6.关于标号
标号就是给某条指令做个标志符号。标号是用来程序转移用的,每行指令前面都可以加标号,有关转移的指令有:计数跳转,循环跳转,无条件跳转,测位跳转以及计数中断,中断操作。上述几条指令有设置跳转到标号的设置,如无条件跳转 L01,其L01便是要转移到的指令的标号。编程时,要仔细配好要跳转的标号,在编程退出时,会有提示,只有所有的跳转指令的跳转号与其标号相匹配,对应的程序才能运行。
7.编辑程序的退出
程序编辑完毕,用退出键退出,此时屏下方会出现:

用左右键选择项目如下:
保存退出 ---- 文件的改动会记住,以后文件就是改动后的内容。
不保存退出 ---- 文件的改动不记忆,还是原来。
退回 ---- 取消退出键,消去屏下方显示,回到编辑文件状态。
说明:改动文件后,系统会重新作标号匹配检查,若匹配,屏左上方出现PASS字样,说明该文件可以运行,否则会出现 Lxx N026 ,意思是第N026有标号不匹配,由于可能有多行不匹配,可用搜索键来找下一个不匹配条行。屏上方左端的信息会显示下一个不匹配行号。
编辑程序退出前,应该全部匹配好,否则该程序是不能运行。
不匹配的文件在一打开时,会提示一个不匹配的行号,但是此时搜索暂时不起作用,要待改动后退出时才行。
指令名称及功能
本系统的指令共有18条
1.空指令:功能是什么也不做,空显示一行
2.电机及方向:1111_XXXX,前四位是分别选择0、1、2、3四电机,1表示未选中,0选中,后四位表示前面电机的方向,0代表正向,1代表反向。
3.速度设置:29999 DX ,步进电机当前运行速度的设置,单位脉冲/秒,可设置最大值29999,实际最大值要看曲线的情况。可用插入方式或改写方式输入数字,参数最后的 DX X=0~3是指定的电机号。
注意:一条新的指令选中后要将全部参数输入完后,方可退出。
电机及方向、速度设置和后面的位移指令为基本指令,一般写在一起,由这三条指令加上结束指令可以组成最简单的程序,电机就可以运转了。
4.速度改变:29999 DX ,功能是从当前已经运行的当前电机把速度升(降)到给出的速度值上继续运行,其数字改变方式同上条。本指令只是一次有效,如电机停后再运行,程序又运行速度设置指令了,速度值仍然以速度设置为准。本指令使用时应有其他条件,如延时、测位等。因为电机运转时已经执行下面的程序了,而每条程序执行的时间是忽略不计的。
5.无条件跳转:LXX 功能为直接跳到 LXX 标号的指令上去而不执行下一程序,即程序转移。
6.循环跳转:60000 LXX ,其功能为以设定的循环次数为依据,程序跳到给定的标号行开始执行,同时循环次数减一,反复进行,直到循环次数为0,程序到下一行。60000为循环次数值。 循环次数的修改可采用插入方式或改写方式,一般可先用 清除/回格键将数字清零,再用插入方式输入数字。
7.输出A XXXXXXXX:功能是,将给定的参数送到输出A,参数的含义为,X不关心位,0,低电平,1,高电平。不关心位是指该位原先的情况仍会保持,不会因本指令而改变。
8.输出B XXXXXXXX:含义同上,把参数送入B口,AB两口有实际的物理接口,详见背面图,低有效。
9.测位跳转 39 S1 LXX:功能为,判断某条件合符要求时程序跳转到含LXX标号的程序上。
39是要判断的位变量,含义为0~7对应输入A(0~7位) ,8~15对应输入B的对应位(0~7位),16~23对应输入C的对应位(0~7位),24~27对应电机0~3的运转位,28~31为内部标记用,32~39为数字键0~7,数字键不按为1,按下为0。S1 S为状态,S状态可设定0,1两种状态,当当前位的状态与S的状态相同则跳转到给定的L标号上。当判断电机运转与停止时,0表示电机停转,1表示电机仍然运转着。数字输入方式,位变量用插入方式,标号只能用改写方式。 位变量修改后用小数点切换到状态S的参数做改动,或用左右键来移动光标,来改变状态S或位变量的值。这两位都选定后用确认键来进入标号值的选定。最后确认键确定选的标号,光标停闪,则本条指令输入完毕。
注:输入A6,A7为编码器输入接口,A6为编码器的方向位,仅对编码器有效,不可做普通输入用,A7为编码器的脉冲输入,A7也可作为普通输入使用。
测位跳转位变量 |
测位跳位变量转对应输入口 |
0 |
输入A0 |
1 |
输入A1 |
2 |
输入A2 |
3 |
输入A3 |
4 |
输入A4 |
5 |
输入A5 |
6 |
输入A6,仅对编码器有效 |
7 |
输入A7 |
8 |
输入B0 |
9 |
输入B1 |
10 |
输入B2 |
11 |
输入B3 |
12 |
输入B4 |
13 |
输入B5 |
14 |
输入B6 |
15 |
输入B7 |
16 |
输入C0 |
17 |
输入C1 |
18 |
输入C2 |
19 |
输入C3 |
20 |
输入C4 |
21 |
输入C5 |
22 |
输入C6 |
23 |
输入C7 |
24 |
0号电机运转状态 |
25 |
1号电机运转状态 |
26 |
2号电机运转状态 |
27 |
3号电机运转状态 |
28 |
内部标记用 |
29 |
内部标记用 |
30 |
内部标记用 |
31 |
内部标记用 |
32 |
数字键0 |
33 |
数字键1 |
34 |
数字键2 |
35 |
数字键3 |
36 |
数字键4 |
37 |
数字键5 |
38 |
数字键6 |
39 |
数字键7 |
10.计数跳转 60000 LXX:本指令是指系统内有一计数器,当计数的值为给定值时,则跳转到给定的标号上,所以要使用这条指令,要在程序经过的地方放一条计数加1的指令。若计数器未到计数值,程序执行下一条。其数据输入方法同循环跳转指令。
11.计数加一:计数器加1,计数器最大值为60000,超过归零。本指令没有参数。
12.计数清零:计数器值归零。本指令没有参数。
13.运动停止:9 DX,电机号DX停止运行,参数可以从0~9可选,其含义当为0时,为曲线降速同升速的逆向。1~9时降速以升速时的曲线1~9倍降速,倍数的含义是曲线与每阶次数的复合,倍数降速停时,先是本值减速每阶次数,不够减时以其剩余值在曲线中跳步减速,可以在停止运动时,让电机很快停下,且又不过冲。 DX选定的电机号。
本指令适合在慢速启动后遇到条件后快速停止的情况。
注:每个电机要遇本指令要停止运动,要分别设定。
14.位移:0.0 D0 步进电机遇本指令,即以给定的速度(速度设置指令或默认速度),方向(电机及方向指令)及给出位移电子齿轮乘脉冲值)运行,其位移范围显示为 6000.0。 当位移值设定为6000.0时,表示电机一直运行而不停。用插入或改写方式输入数字,确认后再选定电机号DX,X=0~3,再确认本指令。小数位用小数点键或者左右移键选定光标,再改数。
15.中断操作:I0 S000 E245 L00 中断操作是指某条件发生时,停止执行任何指令而去执行指定的指令。
I0 中断号,其数字部分为0~7,对应8个外部输入(外部输入中断入口),分别为0~3对应输入A0~3,4~6对应输入C的0~2。7对应整个输入B口有信号改变。中断号0~6是下降沿有效,中断信号7是输入B口的改变,即任一B口的电平0→1或1→0都会引起中断。
中断号 |
中断号对应信号量 |
0 |
输入A0 |
1 |
输入A1 |
2 |
输入A2 |
3 |
输入A3 |
4 |
输入C0 |
5 |
输入C1 |
6 |
输入C2 |
7 |
输入B 0~7 任一位的电平改变 |
中断操作的执行时在中断允许范围内有中断信号出现且当前的指令执行结束(除延时)即跳到给出的标号去执行,一旦在新标号处执行完一条指令,只要是中断允许范围内,则会重新开放中断。
中断允许范围,即 SXXX ,EXXX。XXX是行号,SXXX是开始允许,EXXX指终了允许,即行号处于两者之间(含两者)为中断允许范围。SXXX,EXXX中参数的修改方式只能是插入方式,可按回格键清零数据后再重新输入数据。
数据输入:中断号IX ,中断范围 SXXX、EXXX属同组数据,可用左右移键或小数键来切换光标,再改数据,只能用插入方式。如果将终了允许EXXX的数据设成小于开始允许,那么则中断信号不起作用。
LXX为中断信号有效且允许时,程序转移的位置。
16.计数中断 60000 LXX:计数中断是外部信号由输入A7口进来脉冲信号经过计数分频(由参数设置设定)后,到达计数值则引起中断,程序转移到标号 LXX处运行。数据输入同循环跳转指令。 如果计数分频设为0(默认),则计数中断关闭,否则一直开着。总的计数到引起中断的值为 计数分频×计数值。
本指令用于编码器的输入(输入A6为编码器方向)。这条指令执行后,系统打开硬件计数器中断,直到总的计数到引起计数中断后,系统关闭硬件计数器。若要再使用计数中断,需要再用一下本指令。
注:硬件计数器的计数分频值(由参数设置设定)最小为2,设置为0时计数器关闭。
17.输出:C XXXXXXXX前四位分别对应测位跳转的位31~28,第6位为1时讯响有效。第7、8位面板两个LED灯,为0有效。修改方法移位加0或1或为X(数字大于2)。
- 输出D
XXXXXXXX,分别对面面板上的8个LED灯
0XXXXXXX 对应 L7亮,低有效
X0XXXXXX 对应 L6亮,低有效
XX0XXXXX 对应 L5亮,低有效
XXX0XXXX 对应 L4亮,低有效
XXXX0XXX 对应 L3亮,低有效
XXXXX0XX 对应 L2亮,低有效
XXXXXX0X 对应 L1亮,低有效
XXXXXXX0 对应 L0亮,低有效
- 结束
到了本指令而且电机都不再运行时程序会回到第一行等待运行键。
自动运行状态 进入自动运行状态显示如下:
上图文件名 W61 是当前文件名,要匹配后方可运行。
曲线次数是电机运行的升降曲线以及每阶曲线走的重复次数,电机0、1走曲线M,电机1、3走曲线N。M,N分别可选0~4条曲线,从快到慢共5条。
电机0 位移 0.0 速度 4000
这几项时显示当前电机的运行状况,若运行则会动态显示当前位移值(位移值为电子齿轮乘脉冲值),且以当前速度运行。假若在位移指令前没有设定速度指令,系统会以4000做为默认速度,否则显示当前速度设置值。
计数 4 循环次数 0 延时 0.0
以上内容表示计数是计数器的值,循环次数若指令进入循环跳转,则指示当前的循环次数,进入一次循环次数加1.这样可以看到当前程序的流向。延时0.0反映若遇到延时指令时显示当前过去了的时间,以0.1秒改变(延时指令的分辨率是是0.01)
N019 L07 测位跳转 32 S1 L07
N030 结束
N031 L08 输出C 1XXXX10X
这三行时显示当前程序运行的周围三行指令。光标在的那行为当前运行行。随着程序的运行,当前行以及周围行会不断的改变,有利于了解程序走向。
输入A 0H 1H 2H 3H 4H 5H 6H 7H
实时反映输入A口的状况,H为高电平,L低电平。反白的是最后改变过的。
输入B 0H 1H 2H 3H 4H 5H 6H 7H
输入C 0H 1H 2H 3H 4H 5H 6H 7H
输入B,C功能与输入A相同。
输出A 0H 1H 2H 3H 4H 5H 6H 7H
输出A显示输出A口的状况,由指令输出A改变。
输出B功能与输出A相同。
屏上显示最下一行分别为:

文件(F0),按后可修改当前文件名,再输入数据,用确认键确认或退出键取消。
清零(F2),在程序停止时可清零所有位移,按后显示“确实要清零位移?”用确认键确认,其他键取消。
退出键(F4),在程序停止时用此键(或退出键)退回原始图面上去,退出自动状态。
连续/单段(F7),在连续运行与单段运行之间切换,单段运行时每按一次运行键程序执行一条指令,可用于调试。可能会与连续运行不一样的情况,如中断或判位跳转时。
连续键,再按运行键后,程序将连续执行,此时可用停止键暂停程序运行,再按运行键继续。在运行中也可按 F7 键进入单段,从单段到连续要先按F7键后再按运行键。
“暂停”,“停止”,“运行”字样依据当前程序运行状态在屏上部显示。
单段每运行一条指令后便暂停等运行键。
暂停时,按退出键F4才能回到停止状态。
当前文件内容的更改只能到编辑状态下才能进行。
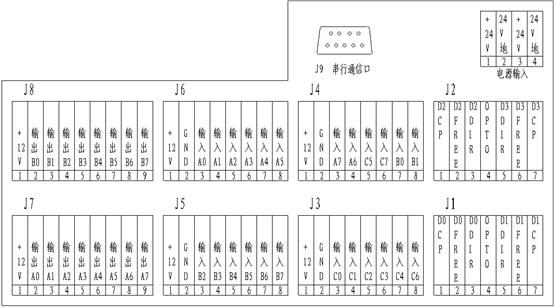
电源输入端:
1,2 为 系统使用的直流24V主电源
3,4 为 输入输出使用的直流24V电源
J1为电机D0及D1信号接口
D0 CP --- 0号电机脉冲信号输出
D0 FREE --- 0号电机脱机信号输出
D0 DIR --- 0号电机方向信号输出
OPTO --- 驱动器信号公共阳端
D1 CP --- 1号电机脉冲信号输出
D1 FREE --- 1号电机脱机信号输出
D1 DIR --- 1号电机方向信号输出
J2为电机D2及D3信号接口
D2 CP --- 2号电机脉冲信号输出
D2 FREE --- 2号电机脱机信号输出
D2 DIR --- 2号电机方向信号输出
OPTO --- 驱动器信号公共阳端
D3 CP --- 3号电机脉冲信号输出
D3 FREE --- 3号电机脱机信号输出
D3 DIR --- 3号电机方向信号输出
控制器与我厂M系列驱动器配套使用时,控制器的OPTO,CP,DIR,FREE分别接驱动器的同名端。
控制器与我厂D系列驱动器配套使用时,控制器的OPTO接驱动器的CP+,DIR+,FREE+,控制器的CP接驱动器的CP-,控制器的DIR接驱动器的DIR-,控制器的FREE接驱动器的FREE-。
J3为外部输入C信号接口
+12V --- 控制器内置12V电源正端
GND --- 控制器内置12V电源地
输入C0 --- 外部通用输入C0
输入C1 --- 外部通用输入C1
输入C2 --- 外部通用输入C2
输入C3 --- 外部通用输入C3
输入C4 --- 外部通用输入C4
输入C6 --- 外部通用输入C6
J4为外部其他输入信号接口
+12V --- 控制器内置12V电源正端
GND --- 控制器内置12V电源地
输入A7 --- 外部通用输入A7,同时也可做外部编码器B输入
输入A6 --- 外部通用输入A6,同时也可做外部编码器A输入
输入C5 --- 外部通用输入C5
输入C7 --- 外部通用输入C7
输入B0 --- 外部通用输入B0
输入B1 --- 外部通用输入B1
J5为外部输入B信号接口
+12V --- 控制器内置12V电源正端
GND --- 控制器内置12V电源地
输入B2 --- 外部通用输入B2
输入B3 --- 外部通用输入B3
输入B4 --- 外部通用输入B4
输入B5 --- 外部通用输入B5
输入B6 --- 外部通用输入B6
输入B7 --- 外部通用输入B7
J6为外部输入A信号接口
+12V --- 控制器内置12V电源正端
GND --- 控制器内置12V电源地
输入A0 --- 外部通用输入A0
输入A1 --- 外部通用输入A1
输入A2 --- 外部通用输入A2
输入A3 --- 外部通用输入A3
输入A4 --- 外部通用输入A4
输入A5 --- 外部通用输入A5
J7为输出A信号接口
+12V --- 控制器内置12V电源正端
输出A0 --- 通用输出A0
输出A1 --- 通用输出A1
输出A2 --- 通用输出A2
输出A3 --- 通用输出A3
输出A4 --- 通用输出A4
输出A5 --- 通用输出A5
输出A6 --- 通用输出A6
输出A7 --- 通用输出A7
J8为输出B信号接口
+12V--- 控制器内置12V电源正端
输出B0 --- 通用输出B0
输出B1 --- 通用输出B1
输出B2 --- 通用输出B2
输出B3 --- 通用输出B3
输出B4 --- 通用输出B4
输出B5 --- 通用输出B5
输出B6 --- 通用输出B6
输出B7 --- 通用输出B7 |
J9为通用9芯串行通信口
J9可用于控制器与控制器通信。通过此通信口,可完成控制器上已编辑程序的发送与接收。
|